Now, its pretty easy to set up a basic pole vector controller; just select the controller and then the IK handle. The problem is if you move the leg about you might have to counter-animate. If you want to make sure it follows your foot controller and IK handle this is a handy and quick way to make it happen!
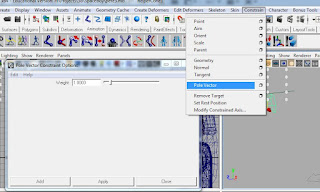
select knee controller then IK handle and constrain>pole vector
put knee controller under a group (cntrl+g)
center pivot on group

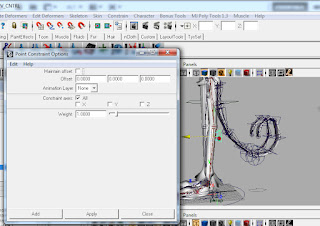
Select IK hip joint, foot controller, and lastly the knee group (group above the pole vector control)

Constrain>point constraint
the controller popping behind the knee is normal, don't worry about it!

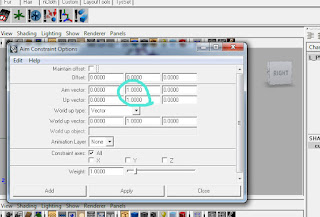
select IK hip joint, shift select knee group (the group above your pole vector controller)
constrain>aim constraint
aim vector is Y = 1, up vector y=1 as well (default)
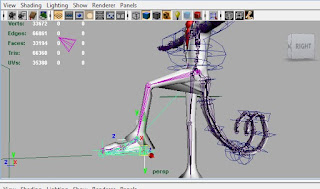
select the curve contoller (not group) for the pole vector knee and move forward
freeze transforms on it
now you can adjust the foot controller and your polevector controller will follow!
a little confusing on what you mean by the knee controller vs pole vector control. Do you group the pole vector control(shape) or the knee control(shape/FK)? I assume you meant in steps 1 and 2 by knee controller, you mean the pole vector control(shape) needs to be in a group by itself?
ReplyDeletethe knee controller is the nurbs shape (cone is depicted); the shape does need to be in a group by itself (see 4th image); the hypergraph shoes the L_PV_CNTRL (the knee controller) under the group mentioned. Let me know if that doesn't clarify and I will try to explain further. Good luck!
ReplyDelete